Quelle(s) solution(s) de relevé 3D choisir pour son projet ?

Choisir une solution de relevé 3D adaptée à son projet

De l’application de scan pour smartphone de l’incontournable Matterport, aux scanners mobiles proposés par notre partenaire NavVis en passant par les scanners statiques Leica, Trimble ou Faro, les technologies de numérisation 3D ne cessent d’évoluer. Ces dernières répondent à des usages de plus en plus spécifiques et permettent de tendre vers une rapidité d’acquisition ou une précision du nuage de points toujours accrues. Parallèlement, les scanners 3D sont accompagnés de fonctionnalités et logiciels de plus en plus aboutis, permettant d’optimiser les flux de travail tant pour les opérateurs que pour les modeleurs, et favorisant les processus de scan to BIM.
Nous vous proposons ci-dessous un tour d’horizon des différentes technologies de relevé 3D.
Quelques notions élémentaires : le LiDAR, capteur à la base de la lasergrammétrie
Pour le secteur du bâtiment, on pense souvent LiDAR lorsqu’on parle de relevé 3D ou de « laser-scanning ». Et effectivement, les scanners laser 3D statiques et dynamiques que nous allons vous présenter ci-dessous intègrent tous des capteurs LiDAR (Light Detection And Ranging).
Le LiDAR est la base du télémètre, c’est un système laser actif permettant de mesurer la distance à un objet. La position et l’orientation du capteur étant connues, les coordonnées XYZ d’un point de la surface sur laquelle s’est réfléchie le laser peuvent être calculées. La répétition de ce processus et le balayage laser émis par le capteur sur tout l’espace permettent alors de constituer un « nuage de points ».
Les scanners statiques

Les scanners statiques (scanner sur un trépied) sont les solutions de numérisation les plus répandues aujourd’hui. Elles permettent de générer des levés très précis et des nuages de points très denses. Cependant, malgré l’évolution de ces technologies, celles-ci restent moins rapides que les scanners mobiles pour de très grandes surfaces.
Afin de garantir la qualité des données captées, plusieurs règles doivent être suivies lors de l’utilisation d’un scanner statique :
- la position des stations doit permettre un recouvrement important entre les nuages de deux stations consécutives, sans pour autant alourdir la volume de données captées ;
- « boucler » le parcours afin de limiter le risque de dérive et améliorer le post-traitement des données ;
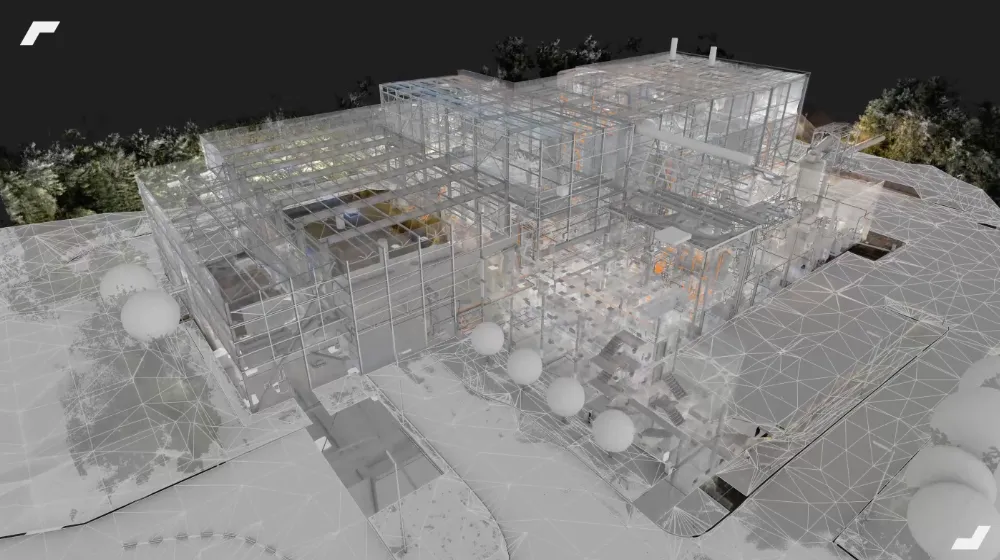
- utiliser des cibles et sphères pour optimiser la consolidation des nuages lorsque l’environnement comporte peu d’éléments géométriques caractéristiques. Celles-ci doivent être idéalement positionnées : si possible non-alignées, avec une variation de hauteur et être visibles depuis plusieurs stations. Il faut un minimum 3 cibles ou sphères communes entre deux stations ;
- choisir une densité de points répondant au cahier des charges du client et permettant d’avoir suffisamment de points sur les sphères et les cibles ;
- définir le bon mode de colorisation du nuage : celui-ci est souvent une évidence, lors de l’utilisation de plusieurs technologies de scan, mais réaliser des stations en noir blanc (relevé bien plus rapide) peut être utile pour consolider un autre nuage colorisé capté au scanner dynamique ;
- dans le cas des scanners statiques, il y a au maximum une photo 360° par station, il faut donc bien choisir la position des stations pour avoir une visite virtuelle pas trop lourde tout en permettant d’explorer tous les recoins. Il y a donc une optimisation à prévoir faute de faire exploser le temps d’intervention et le volume de données captées.
Systèmes d’acquisition mobiles

Les scanners mobiles, ou dynamiques, correspondent aux systèmes de relevé 3D disposant d’un système de localisation leur permettant de se situer dans l’espace. Celui-ci est composé de différents éléments :
- un système de positionnement par satellites (Global Navigation Satellite System, ou GNSS) ou par cartographie simultanée (Simultaneous Localization And Mapping, ou SLAM) permettant au scanner de construire sa liste de positions au cours du temps ;
- une centrale inertielle (Inertial Measurement Unit, ou IMU) permettant d’intégrer les mouvements et déplacement du scanner pour estimer son orientation et sa vitesse linéaire. Sa position précise est déduite de la fusion des différentes données issues des capteurs (IMU, LIDAR, caméra).
L’avantage de ces technologies d’acquisition mobiles réside dans leur vitesse de captation. Si l’on prend l’exemple du scanner mobile NavVis M6 que nous utilisons lors de nos gros projets, nous sommes en capacité de relever jusqu’à 15.000m² par jour (selon la configuration de la zone).
L'acquisition par drone
Finalement, l’usage de drones permettra de relever les zones les moins accessibles d’un bâtiment (façades extrêmement hautes, toitures et zones inaccessibles pour les opérateurs)
Dans le domaine de la numérisation 3D aérienne de bâtiments, deux méthodes d’acquisition par drones coexistent :
- L'acquisition 3D par LiDAR, en utilisant des capteurs LiDAR embarqués sur le drone, permettant de générer un nuage de points 3D
- La production de rendus photogrammétriques, consistant à reconstituer un modèle 3D à partir de photos du bâtiment prises à différents points de vue.
À noter : l'usage de drones en numérisation indoor émerge, permettant ainsi de compléter les zones intérieures numérisées au scanner dynamique ou statique.
Pourquoi opter pour un relevé multi-technologies ?
Le choix des technologies sera directement lié à l’exploitation finale des données, au cahier des charges du client et aux spécificités des bâtiments. Chaque projet doit être étudié en fonction de ces variables afin de définir quelles seront les solutions adaptées, et s’il serait optimal d’en combiner plusieurs.
Chez My Digital Buildings, nous maîtrisons un protocole de scan 3D de bâtiments multi-technologies. Ainsi, nous tirons le meilleur parti de chaque système d’acquisition du marché pour répondre au mieux aux spécificités des bâtiments et aux besoins exprimés par nos clients. Cela nous permet également d’étendre notre champ d’action, d’être plus performant sur site, de réduire notre temps d’intervention et de livraison.
Par exemple, nous associons régulièrement nos scanners dynamiques pour couvrir rapidement de grandes surfaces faciles d’accès à des scanners statiques permettant d’accéder à des zones plus encombrées, des points en hauteur, ou pour relever des zones nécessitant une captation plus précise. Pour ce qui est de la numérisation par drone, nous réservons généralement cette solution pour les toitures et façades difficiles d’accès lorsque le projet inclut une numérisation de l’extérieur du bâtiment.
Comment les nouvelles technologies de scan 3D démocratisent-elles les projets de numérisation ?
Les nouvelles technologies de numérisation 3D, et notamment les plus rapides, ont non seulement permis de réduire le coût associé à un relevé, mais aussi le temps d’intervention sur site. Ainsi, la perturbation associée à l’intervention est également réduite, ce qui peut être clé dans le secteur de l’industrie, sur un site en travaux ou occupé.
Au-delà de lever ces deux potentiels freins aux projets de numérisation, les scanners 3D nouvelle génération ont également démocratisé les projets de « Scan to BIM » ou de nouveaux usages impliquant une récurrence dans les relevés. On peut notamment prendre l’exemple de la détection de clash, méthode visant à définir des actions correctives avant des étapes clés d’un projet de construction en fonction des différences observées entre la maquette de conception et le nuage de points.
Parallèlement, les solutions de scan dynamiques permettent de déployer des visites virtuelles plus exploitables des bâtiments. En effet, lors d’un relevé au scanner statique, le nombre de photos capturées est égal au nombre de stations effectuées. Il faut donc multiplier les stations pour reconstituer une visite virtuelle permettant d’avoir une vue exhaustive du bâtiment, ce qui se trouve être bien trop chronophage. À l’inverse, à lorsque l’on utilise un scanner dynamique, la prise de photo n’est pas chronophage ou contraignante puisqu’elle sera continue et relative aux déplacements du scanner.
L’évolution continue de ces technologies est donc un réel vecteur de démocratisation de la numérisation 3D, qui favorisera par extension différents sujets autour de la numérisation, comme la mise en place du BIM ou de la visite virtuelle à grande échelle par exemple.
Glossaire
Cibles : « panneaux » composés d’un damier apposé à des endroits clés du bâtiment à relever. Elles favorisent la consolidation du nuage de points.
Nuage de points : ensemble de points placés dans un système de coordonnées à trois dimensions. Chaque point est défini par ses coordonnées x, y et z, et éventuellement sa couleur. Ce nuage est l’empreinte géométrique d’un objet ou d’un bâtiment.
Scan to BIM : processus de modélisation d’un bâtiment sur la base de son nuage de points
Sphères : objet sphérique idéalement placé dans l’environnement et servant de référence pour l’assemblage de plusieurs parties de nuage de points.
Étudions ensemble votre projet
Chaque projet commence par une bonne compréhension de vos besoins. Contactez-nous et nous étudierons votre projet pour vous établir un devis dans les meilleurs délais.
Nous contacter





Pour ne rien manquer de nos actualités, abonnez-vous dès maintenant à notre newsletter !
Recevez des nouvelles chaque quadrimestre directement dans votre boîte mail, pour rester informé des dernières actualités et événements chez My Digital Buildings.


