What 3D survey solution (s) should you choose for your project?

Choosing a 3D survey solution adapted to your project

From the smartphone scan application to the essential Matterport, to the mobile scanners offered by our partner NavVis Through static scanners Leica, Trimble gold Faro, 3D scanning technologies are constantly evolving. The latter responds to increasingly specific uses and make it possible to move towards ever greater speed of acquisition or precision of the point cloud. At the same time, 3D scanners are accompanied by increasingly advanced functionalities and software, making it possible to optimize workflows for both operators and modellers, and promoting scanning to BIM processes.
Below is an overview of the various 3D survey technologies.
Some basic concepts: LiDAR, the sensor at the base of lasergrammetry
For the building sector, we often think of LiDAR when we talk about 3D surveying or “laser-scanning.” And indeed, the static and dynamic 3D laser scanners that we are going to present to you below all incorporate LiDAR (Light Detection And Ranging) sensors.
LiDAR is the basis of the rangefinder, it is an active laser system for measuring the distance to an object. Since the position and orientation of the sensor are known, the XYZ coordinates of a point on the surface on which the laser was reflected can be calculated. The repetition of this process and the laser scanning emitted by the sensor over the entire space then make it possible to constitute a “cloud point”.
Static scanners

Static scanners (scanning on a tripod) are the most common scanning solutions today. They make it possible to generate very precise surveys and very dense point clouds. However, despite the evolution of these technologies, they remain smaller than mobile scanners for very large areas.
In order to guarantee the quality of the captured data, several rules must be followed when using a static scanner:
- The position of the stations must allow significant overlap between the clouds of two consecutive stations, without increasing the volume of data captured;
- “complete” the process in order to limit the risk of drift and improve data post-processing;
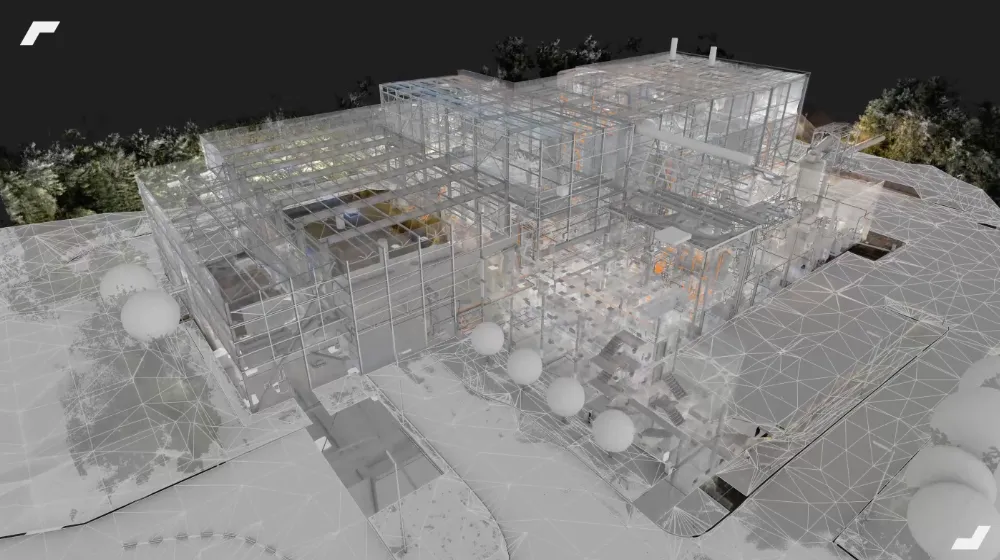
- Use targets and spheres to optimize cloud consolidation when the environment has few characteristic geometric elements. These must be ideally positioned: if possible non-aligned, with a variation in height and be visible from several stations. A minimum of 3 common targets or spheres between two stations is required;
- Choose a density of points that meets the client's specifications and allows to have enough points on the spheres and the targets;
- Define the correct mode of colorization of the cloud: this is often obvious, when using several scanning technologies, but creating stations in black and white (much faster reading) can be useful to consolidate another colorized cloud captured with a dynamic scanner;
- In the case of static scanners, there is a maximum of one 360° photo per station, so you have to choose the position of the stations carefully to have a virtual tour that is not too heavy while allowing you to explore every corner. There is therefore an optimization to be expected in order to avoid exploding the intervention time and the volume of data captured.
Mobile acquisition systems

Mobile scanners, or dynamic scanners, corresponds to 3D survey systems that have a location system allowing them to locate themselves in space. It is composed of various elements:
- A satellite positioning system (Global Navigation Satellite System, or GNSS) or by simultaneous mapping (Simultaneous Localization And Mapping, or SLAM) allowing the scanner to build its list of positions over time;
- An inertial measurement unit (IMU) to integrate the movements and movements of the scanner to estimate its orientation and linear speed. Its precise position is deduced from the fusion of the various data from the sensors (IMU, LIDAR, camera).
The advantage of these mobile acquisition technologies linked in their capture speed. Taking the example of the NavVis M6 mobile scanner that we use during our major projects, we are able to survey up to 15,000 m² per day (depending on the configuration of the area).
Acquisition by drone
Finally, the use of drones will make it possible to identify the least accessible areas of a building (extremely high facades, roofs and areas inaccessible to operators).
In the field of aerial 3D scanning of buildings, two drone acquisition methods coexist:
- 3D acquisition by LiDAR, using LiDAR sensors embedded on the drone, to generate a 3D point cloud
- The production of photogrammetric renderings, consisting in reconstructing a 3D model from photos of the building taken from different points of view.
Note: the use of drones in indoor scanning is emerging, thus making it possible to complete indoor areas scanned with a dynamic or static scanner.
Why opt for a multi-technology survey?
The choice of technologies will be directly linked to the final exploitation of the data, to the customer's specifications and to the specificities of the buildings. Each project must be studied according to these variables in order to define which solutions will be adapted, and whether it would be optimal to combine several of them.
At My Digital Buildings, we master a protocol of 3D scanning of multi-technology buildings. In this way, we make the most of each acquisition system on the market to best meet the specificities of buildings and the needs expressed by our customers. It also allows us to extend our field of action, to be more efficient on site, to reduce our intervention and delivery time.
For example, we regularly combine our dynamic scanners to quickly cover large areas that are easy to access with static scanners that allow access to more congested areas, higher points, or to identify areas that require more precise capture. When it comes to scanning by drone, we generally reserve this solution for roofs and facades that are difficult to access when the project includes scanning the exterior of the building.
How do new 3D scanning technologies democratize digitization projects?
New 3D scanning technologies, especially the fastest ones, have not only reduced the cost associated with a survey, but also the time required to intervene on site. Thus, the disruption associated with the intervention is also reduced, which can be key in the industrial sector, on a site under construction or occupied.
Beyond removing these two potential obstacles to digitization projects, new generation 3D scanners have also democratized the projects of “Scan to BIM” or new uses involving recurrence in surveys. In particular, one can take the example of clash detection, a method aimed at defining corrective actions before key stages of a construction project based on the differences observed between the design model and the point cloud.
At the same time, dynamic scanning solutions make it possible to deploy more usable virtual tours of buildings. In fact, during a static scanner survey, the number of photos captured is equal to the number of stations performed. It is therefore necessary to multiply the stations to reconstitute a virtual visit allowing to have an exhaustive view of the building, which happens to be far too time-consuming. Conversely, when using a dynamic scanner, taking a photo is not time-consuming or restrictive since it will be continuous and relative to the movements of the scanner.
The continuous evolution of these technologies is therefore a real vector for the democratization of 3D scanning, which will by extension promote various topics around digitization, such as the implementation of BIM or large-scale virtual visits for example.
Glossary
Targets : “panels” composed of a checkerboard placed at key locations in the building to be raised. They promote the consolidation of the point cloud.
Point cloud : a set of points placed in a three-dimensional coordinate system. Each point is defined by its x, y, and z coordinates, and possibly its color. This cloud is the geometric imprint of an object or building.
Scan to BIM : process of modeling a building based on its point cloud
Spheres : a spherical object ideally placed in the environment and used as a reference for assembling several point cloud parts.
Let's study your project together
Contact us, we will study your project to provide you with an estimate as soon as possible
Contact us





To make sure you don't miss out on our news, subscribe to our newsletter now!
Receive quarterly updates directly in your inbox to stay informed about the latest news and events at My Digital Buildings.


