Simulation d’aménagement d’un hangar pour hélicoptères

Au détour d’une conversation sur l’aérodrome, j’entends « Est-il possible d’optimiser le rangement du hangar hélicoptère ? Peut-on ajouter du stockage ou une nouvelle machine sans perturber l’existant ? Il faudrait prendre des mesures. ». J’enchaîne sur une proposition bien concrète pour tester un cas d’usage classique : l’optimisation de l’espace. Je propose de numériser le hangar, d’en extraire les plans et de donner accès à toutes les mesures pour faire des simulations. Si le bilan est positif pour ce petit hangar de 500 m2, ce cas d’usage pourra être facilement décliné pour d’autres hangars ou ateliers de la plate-forme.
La société Helisair exploite plusieurs hélicoptères qui sont stockés dans un hangar de grande hauteur. La face nord-ouest de celui-ci est équipé de grandes portes coulissantes permettant une ouverture sur presque toute la largeur. A l’intérieur, de chaque côtés, des rayonnages sont utilisés pour y stocker les consommables et outils d’entretien courant des machines.
La préparation
Nous décidons d’utiliser un scanner mobile pour couvrir cette petite surface rapidement. Nous avons utilisé le scanner laser NavVis M6. Il faut environ 10 minutes pour assembler le scanner rangé dans 4 valises et faire les premières calibrations. Nous discutons rapidement des conditions opératoires et optons pour une numérisation « portes fermées » pour couvrir parfaitement les limites du hangar et matérialiser les portes. Les conditions de lumière ne sont pas exceptionnelle mais suffisantes pour capter des photos. En plus des données 3D, nous enregistrerons des photos panoramiques HD tout au long de la trajectoire. Le réglage retenu est une photo 360° tous les 2 mètres.
Nous échangeons sur la trajectoire optimale à suivre pour capter l’ensemble de la zone. L’enjeu est de permettre aux 3 lidars (capteurs laser) de « tout » voir tout en favorisant les « fermetures de boucles » (loop closure en anglais) qui limitent, voire éliminent, la dérive de localisation qui s’accumule au cours du temps pour ce genre d’équipement. La qualité du nuage de point final dépend directement de l’expérience et du chemin retenu lors de la captation. D’autre part, l’optimisation est importante pour limiter le volume des données captées, il faut juste ce qu’il faut, pas plus. Les données trop redondantes encombrent les serveurs de stockage et pénalise le post traitement et l’usage.
La numérisation
Il n’aura fallu que 15 minutes pour couvrir les 500 m2 du hangar avec la trajectoire présentée dans l’image ci-dessous. Cette image est une projection 2D du nuage de points 3D. Les points rouges indiquent les endroits où les photos panoramiques ont été prises. On remarque des points au delà des limites du hangar, les portes n’étant pas jointives, les fasceaux laser ont captés une petite partie de l’extérieur.

Cette captation a donc permis :
- d’obtenir un nuage de points global, en une fois, avec une densité de 5 mm (distance entre deux points du nuage)
- de prendre 68 photos panoramiques
Ces données brutes représentent 3 Go au total.
Une phase de post traitement (filtrage et amélioration du nuage de points, construction des vues panoramiques à partir des photos des 6 appareils photos) a été nécessaire pour rendre les données initiales exploitables. Le temps de traitement sur l’un de nos serveurs a été d’environ 2 heures pour obtenir le nuage de points global à la densité maximale et les photos 360° assemblées.
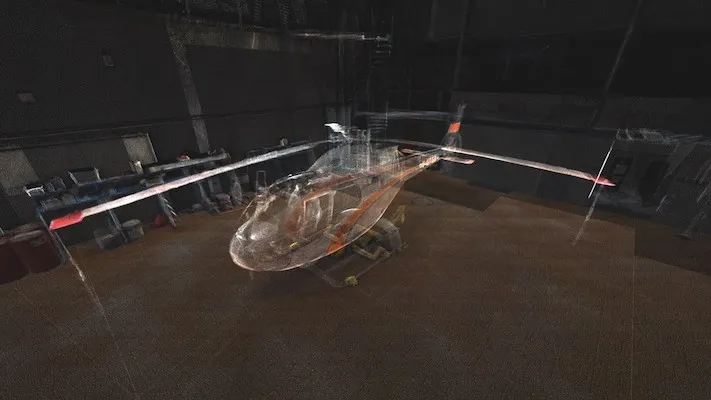
La visite virtuelle
Une phase d’optimisation des données a été nécessaire pour les alléger et leur conférer de bonnes propriétés pour qu’elles puissent être chargées et visualisées dans un navigateur web. Elle a duré environ 30 minutes sur nos serveurs.
Vous pouvez tester la visite virtuelle ci-dessous. Vous visualiserez les points d’intérêt aussi bien sur le plan 2D que dans la vue photoréaliste. Pour trouver les extincteurs, la saisie de « ext » dans la barre de recherche en haut à gauche vour permet d’en obtenir la liste.
Les plans 2D
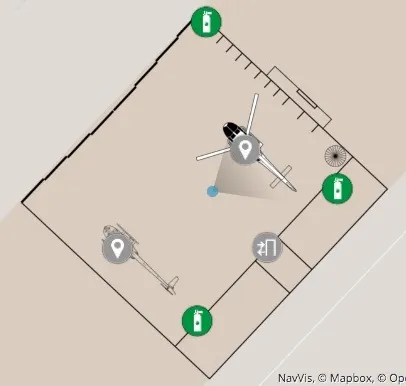
La méthode manuelle la plus efficace pour extraire le plan 2D de la zone est d’utiliser un outil de manipulation du nuage de points pour en prélever une « tranche » horizontale au bon endroit. Sur cette base « métrique » et après quelques traitements pour affiner le trait, on redessine les contours avec un logiciel de dessin CAO orienté architecture. On exporte ensuite dans un format vectoriel DXF ou DWG. Un plan modélisé a été réintégré à la visite virtuelle accessible dans la fenêtre en bas à droite. Ce plan apparaît sur un fond de carte qui donne également la situation du bâtiment à une échelle plus globale.
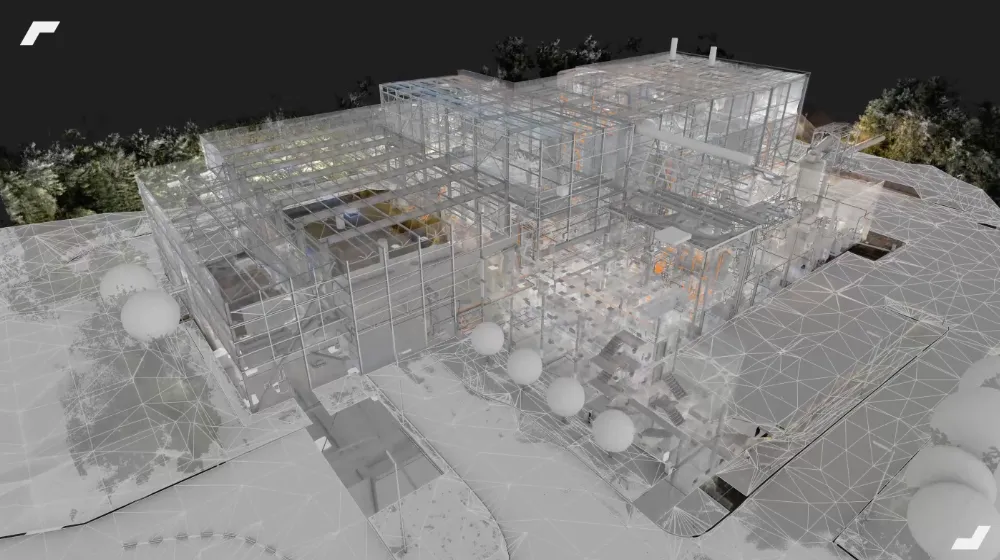
Le modèle 3D
Comme pour les plans 2D, il est possible de « redessiner » un modèle 3D par dessus le nuage de points qui a été capté. De nombreux outils intègrent des options avancées pour détecter des formes et les remplacer par des objets 3D, les plus connus sont Autodesk Revit ou AutoCAD, Trimble RealWorks ou SketchUp, Dassault Système SolidWorks ou Catia, Rhino3D, etc. Ce travail nécessite plus de temps que pour les plans 2D et n’est réalisé que si l’usage le nécessite absolument. Un ordre de grandeur de coût de modélisation 3D de bâtiments est entre 0,50 et 2,00 € par m2 (selon la surface, la typologie et la précision souhaitée).
La simulation
Une fois la base métrique établie au travers des plans 2D ou directement dans un modèle 3D (non obligatoire), il est possible d’importer ces données dans un logiciel de CAO et simuler un nouvel aménagement ou tester de nouveaux emplacements pour les machines.
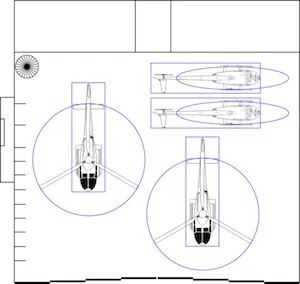
Dans le cas de ce hangar, l’approche à partir du plan 2D a été retenue et le travail n’a été fait qu’à partir de l’emprise au sol. Compte tenu de la hauteur du bâtiments et des objets à stocker, il y a peu de chance de collision avec le plafond. Par exemple, en intégrant les boîtes encadrantes 2D (tracés bleus ci-dessous) pour le fuselage comme pour le rotor, il est possible de déplacer les éléments et optimiser l’espace. Dans ce hangar, par exemple, on peut doubler le stockage de machines et passer à deux R44 et deux EC120.
Conclusion
Que ce soit pour un hangar aéronautique ou plus généralement pour de l’entreposage ou du stockage industriels, il est important d’optimiser l’espace. C’est à la fois une question de coût, d’organisation et de productivité. Ce cas simple et pragmatique décrit une approche 2D pour simuler différentes organisations de l’espace à partir d’outils accessibles. Au delà de ces simulations, les données 3D (nuages de points) peuvent être utilisés par le propriétaire et son architecte (ou le bureau d’étude ou l’entreprise générale) pour chiffrer des travaux. La visite virtuelle peut également être utilisée pour la promotion de l’entreprise et de son activité.
Pour en savoir plus, découvrez :
Étudions ensemble votre projet
Chaque projet commence par une bonne compréhension de vos besoins. Contactez-nous et nous étudierons votre projet pour vous établir un devis dans les meilleurs délais.
Nous contacter





Pour ne rien manquer de nos actualités, abonnez-vous dès maintenant à notre newsletter !
Recevez des nouvelles chaque quadrimestre directement dans votre boîte mail, pour rester informé des dernières actualités et événements chez My Digital Buildings.


