Genere y utilice la nube de puntos 3D de un edificio

La nube de puntos de un edificio: representación 3D de la realidad

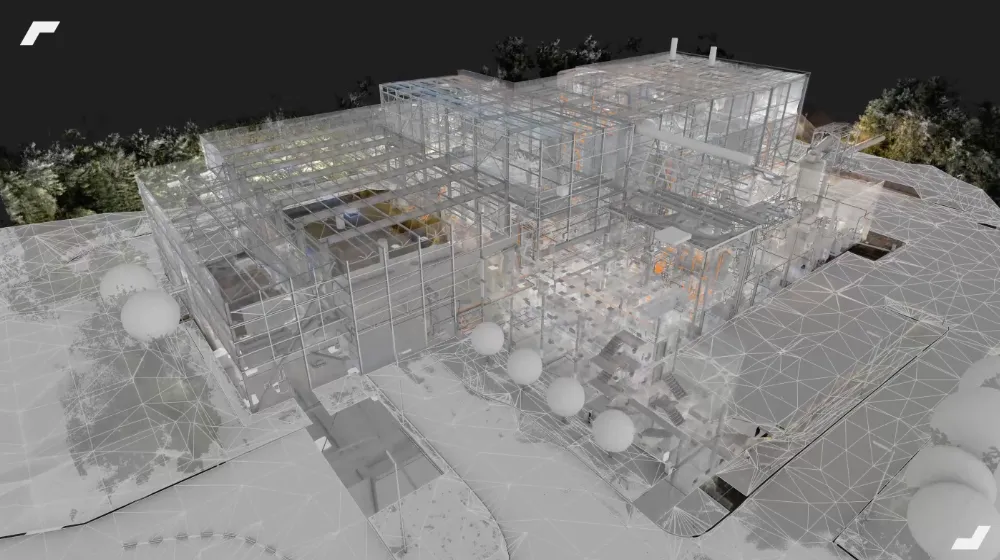
Una nube de puntos es una representación digital en 3D de un objeto o espacio. Compuesta por millones de puntos, cada uno de los cuales se coloca según un sistema de coordenadas x, y y z. A diferencia de otros modos de representación 3D, como las mallas, los puntos de la nube no están bloqueados entre sí.
En este artículo, nos centramos en la cantidad de puntos de los espacios y los elementos técnicos del edificio. Sin embargo, sobre la base de principios de adquisición similares, es posible producir varios puntos en otros niveles: desde la parte mecánica hasta la de una ciudad o territorio.

Como se ha ilustrado anteriormente, una nube de puntos de construcción es una ubicación 3D de un edificio y del equipo que contiene. Como representación no modificada o simplificada de la realidad, este formato es el más adecuado para la búsqueda de detalles y para análisis detallados, como la toma de dimensiones o el análisis de la planitud, por ejemplo.
¿Cómo puedo generar una nube de puntos?
Lásergrametría en la base de la adquisición de nubes de puntos
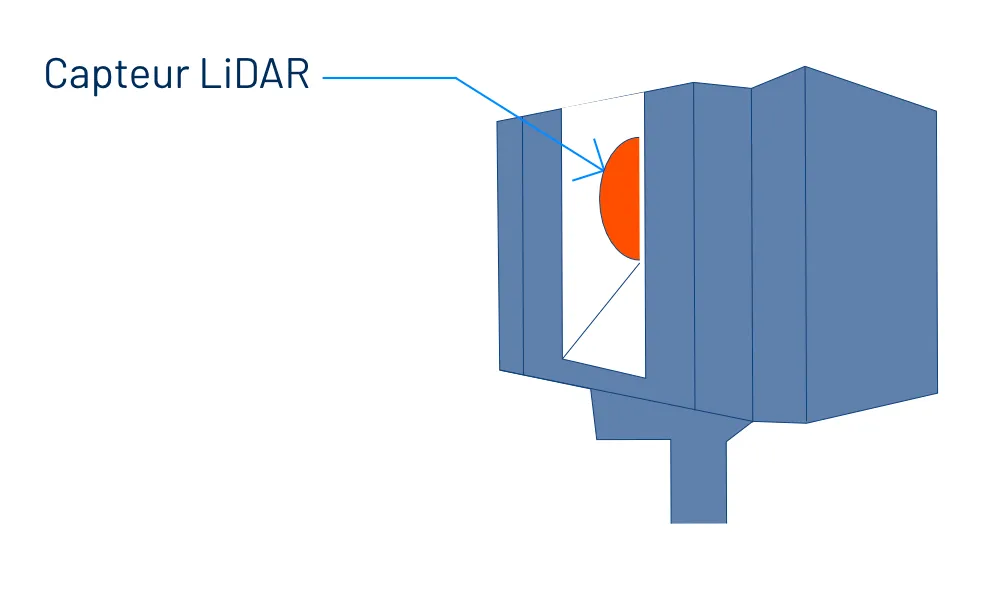
Desde los telémetros láser tradicionales hasta las nuevas soluciones de adquisición, los sistemas de medición se basan en el principio de la lasergrametría y en el uso de sensores LiDAR, que están equipados con escáneres 3D y ciertos drones.
Estos sensores emiten un haz de luz que escanea el entorno horizontal y verticalmente hasta encontrar obstáculos (pared, suelo, muebles, máquinas, etc.).
Luego se mide la distancia a cada obstáculo para posicionar un punto en el espacio. La repetición de este proceso durante el escaneo permite crear una nube de puntos sin procesar. Por lo tanto, el escáner toma muestras del entorno colocando un punto en cada ubicación en la que se haya encontrado un obstáculo. La precisión de este escaneo y el alcance del escáner se basan en la configuración elegida y, a continuación, definen una cierta densidad de puntos.
Según el método de adquisición y los sensores utilizados, una nube de puntos puede estar en blanco y negro o coloreada. El proceso de colorear los puntos es el resultado del uso de la fotografía panorámica tomada por el escáner.
En el sector de la construcción, los escáneres terrestres (estáticos y dinámicos) son los equipos de captura más comunes. El uso de drones para elevar fachadas, techos o estructuras exteriores también es una de las novedades de los últimos años.
La adquisición de una sola nube de puntos sin procesar rara vez cubre todo un edificio, especialmente cuando se utiliza un escáner de suelo estático. Se tratará entonces de recalcular y ensamblar varias nubes de puntos.
Adquisición y ensamblaje de nubes de puntos con un escáner estático
Las soluciones de encuesta más comunes, las escáneres estáticos permiten generar nubes de puntos particularmente densas. Montados sobre un trípode y equipados con un sensor LiDAR único, estos escáneres permiten digitalizar un entorno «estación por estación», ya que cada estación ocupa una posición fija en la que el escáner (montado en un trípode) escanea el entorno a una distancia de aproximadamente 320°.

Por lo tanto, se genera una nube de puntos para cada una de las estaciones, y todas las nubes deben «ajustarse» entre ellas. Este ajuste puede tener lugar:
- por superposición, utilizando el método ICP (punto cerrado iterativo), que analiza la distancia entre los puntos de dos nubes para estimar las mejores transformaciones y alineaciones posibles;
- colocando objetivos y esferas colocados en el entorno durante la captura, lo que permite optimizar la consolidación cuando el entorno tiene pocos elementos geométricos característicos.
Adquisición y ensamblaje de nubes de puntos con un escáner dinámico
A diferencia de los escáneres estáticos, escáneres móviles (o dinámicas) permiten digitalizar el entorno mientras se mueve. Este principio de captura en movimiento está permitido por dos elementos:
- Un sistema de localización cartográfica simultánea (SLAM) que permite ubicar el escáner en el espacio;
- Una unidad inercial (IMU), que analiza los movimientos y movimientos del escáner para estimar su orientación y velocidad lineal.
Por lo tanto, la nube de puntos capturada cubre un área completa, en la que el operador se movió con el escáner mediante:
- cubriendo toda el área desde el punto de vista de la superficie;
- omitiendo los objetos (por ejemplo, muebles) y los elementos estructurales (por ejemplo, pilares) de la zona para obtener una digitalización completa.

Por lo tanto, cada nube de puntos representa un área definida del edificio que el operador habrá elegido para viajar.
Se tratará entonces de ensamblar cada nube de puntos. Para ello, deberán identificarse los objetivos comunes a varias nubes de puntos.
Una estación total también puede registrar las coordenadas de estos objetivos e inyectarlas en el posprocesamiento para facilitar el ensamblaje de las nubes de puntos y corregir las derivas relacionadas con el SLAM.

Las nubes de puntos de los escáneres estáticos y dinámicos también se pueden ajustar juntas de acuerdo con estos principios. Este es exactamente el enfoque de nuestro protocolo de escaneo 3D multitecnológico, cuya implementación permite aprovechar las ventajas de cada solución.
Formatos de archivo de nube de puntos
Existen múltiples formatos de archivo de nube de puntos, entre los más conocidos, podemos nombrar por ejemplo:
- OBJ: el formato adoptado por una amplia gama de aplicaciones, como Bentley Systems, RealityCapture y Trimble.
- PLY: inspirado en OBJ y diseñado especialmente para almacenar datos 3D. PLY es un formato de archivo que puede representar el color, la transparencia, las normales de la superficie, la textura y las coordenadas de los datos.
- LAS: uno de los formatos estándar de la industria, ampliamente utilizado y compatible con la mayoría de los programas.
- PCG, RCS, RCP: formatos de archivo desarrollados por Autodesk adaptados a su suite de software.
- E57: un formato de archivo independiente para almacenar datos de nubes de puntos y otros metadatos producidos por escáneres láser. Este tipo de formato se ha convertido en uno de los formatos más utilizados en los últimos años.
Capturar una nube de puntos 3D, un primer paso hacia una multitud de usos
Los primeros casos de uso básico
Una nube de puntos, incluso sin procesar, ya permite multitud de usos. De hecho, al utilizar software especializado (como Cyclone, 3DR, 3DR, Scene o Realworks), una nube de puntos es una representación completa y precisa del edificio en el que se busca información. Por información, nos referimos aquí a las inspecciones (búsqueda de detalles, análisis de superficies, etc.) que se pueden llevar a cabo en una escena 3D, o a la posibilidad de tomar en ella dimensiones, superficies y dimensiones.
Aunque solo sea con estos dos primeros casos de solicitud, ya se ha reducido el número de viajes hacia y desde un sitio, ¡y las dudas sobre la realidad del campo desaparecen constantemente! Además de manipular esta nube de puntos sin procesar, ha demostrado ser una base fiable para crear y actualizar otros datos espaciales para un proyecto (en particular, planos 2D y modelos digitales).
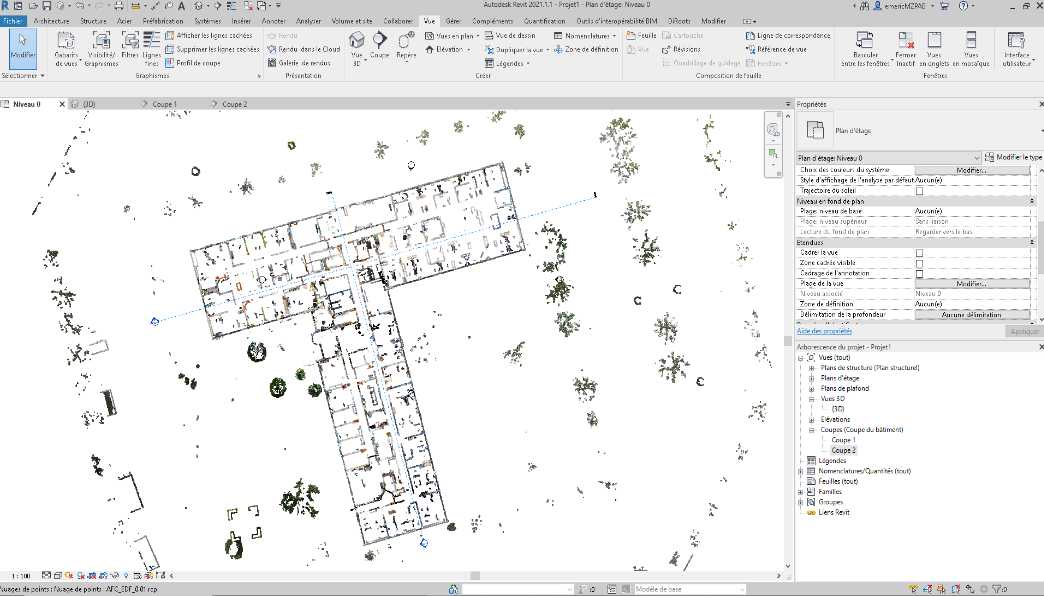
Dibuja un plano 2D basado en la nube de puntos
Desde una nube de puntos, es posible aislar secciones horizontales y verticales en la nube, lo que permite la creación de secciones, perfiles o vistas 2D. Estas secciones se pueden usar luego para dibujar varias geometrías 2D (planos de edificios en formato DWG, planos de elevación, planos de marcos, planos de techos, etc.) mediante un software empresarial como AutoCAD. Por lo tanto, los planos 2D dibujados o actualizados se producen a partir de una impresión de la realidad particularmente precisa.
Escaneo a BIM: de nubes de puntos a modelos BIM
Como detallamos en este artículo sobre la» Escanear a Bim », la nube de puntos se puede utilizar como una capa de modelado 3D de un edificio.
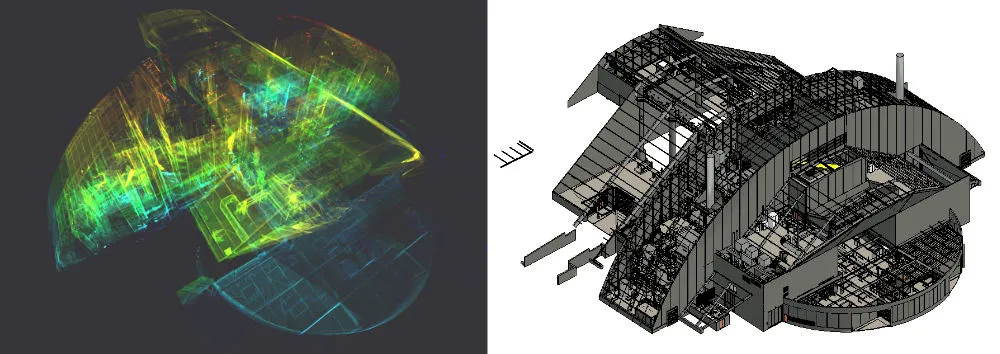
Este método permite modelar un edificio más rápidamente y confiar en una impresión de la realidad particularmente confiable para avanzar hacia un modelo del edificio «tal como se construyó» (tal como se construyó).
Detección de choques y actualización de un modelo digital 3D/BIM
Cada vez es más común que las oficinas de diseño, los arquitectos y los gerentes de proyectos se beneficien de un modelo digital del edificio desde el inicio de un proyecto.
Desde el modelo de diseño inicial hasta el modelo «tal como se construyó» del edificio, está sujeto a evolucionar. Mantenerlo actualizado puede entonces ponerse en tela de juicio. Por lo tanto, se tratará de verificar las diferencias entre el modelo y el modelo real para converger en un modelo «tal como está construido».
Para ello, programas como Navisworks o Autodesk permiten insertar la nube de puntos (que actúa como un repositorio espacial actualizado del edificio) en el modelo digital existente.
De este modo, es posible detectar las diferencias (llamadas «choque») entre estas dos entidades, una es una representación de lo real y la otra el modelo geométrico hacia el que se desea tender. Este método tiene dos ventajas principales:
- poder actualizar el modelo de diseño digital siguiendo la evolución del sitio;
- detectar posibles conflictos y reaccionar antes de que generen costos adicionales significativos.
Realidad virtual y nubes de puntos 3D
Por último, una nube de puntos 3D se puede utilizar en aplicaciones de realidad virtual, en particular para realizar simulaciones de diseño, por ejemplo. Luego se utiliza como un medio sin procesar para eliminar y añadir objetos 3D o para «recortar» y mover partes de la nube de puntos inicial.
Concretamente, esto permite, por ejemplo, seleccionar una máquina y moverla por su entorno para definir su nueva ubicación.
¿Hacia una democratización de la captura de la realidad?
Si bien las soluciones de escaneo móvil ya han democratizado la captura de la realidad gracias a la velocidad de captura que ofrecen, están surgiendo nuevas soluciones que deberían acelerar esta democratización.
Entre estas, podemos mencionar las recientes BLK2FLY, el primer «escáner láser volador autónomo» de Leica Geosystem. O de nuevo, el reciente La colaboración de Leica con Boston Dynamics, presentando otra solución de captura autónoma, ¡pero esta vez terrestre!
Para contrarrestar el impacto potencial de estos avances, no olvidemos que actualmente solo los operadores presentes en el campo pueden gestionar una multitud de problemas operativos.
Por lo tanto, estas soluciones podrían marcar un gran avance en la automatización de la actualización de los datos de edificios en 3D, sin reemplazar una captura inicial que a menudo es demasiado compleja.
Para saber más
Estudiemos tu proyecto juntos
Póngase en contacto con nosotros, estudiaremos su proyecto para proporcionarle un presupuesto lo antes posible
Póngase en contacto




¡Para no perderse ninguna de nuestras novedades, suscríbase ahora a nuestro boletín!
Reciba actualizaciones cada trimestre directamente en su correo electrónico para mantenerse informado de las últimas noticias y eventos de My Digital Buildings.


