Generate and use the 3D point cloud of a building

The point cloud of a building: 3D representation of reality

A point cloud is a 3D digital representation of an object or space. It consists of millions of points, each of which is placed according to an x, y, and z coordinate system. Unlike other 3D representation modes such as meshes, the points in the cloud are not linked together.
In this article, we will remain focused on the point cloud of spaces and technical elements of the building. However, by following similar acquisition principles, it is possible to produce point clouds at other scales: from the mechanical part, to that of a city or a territory.

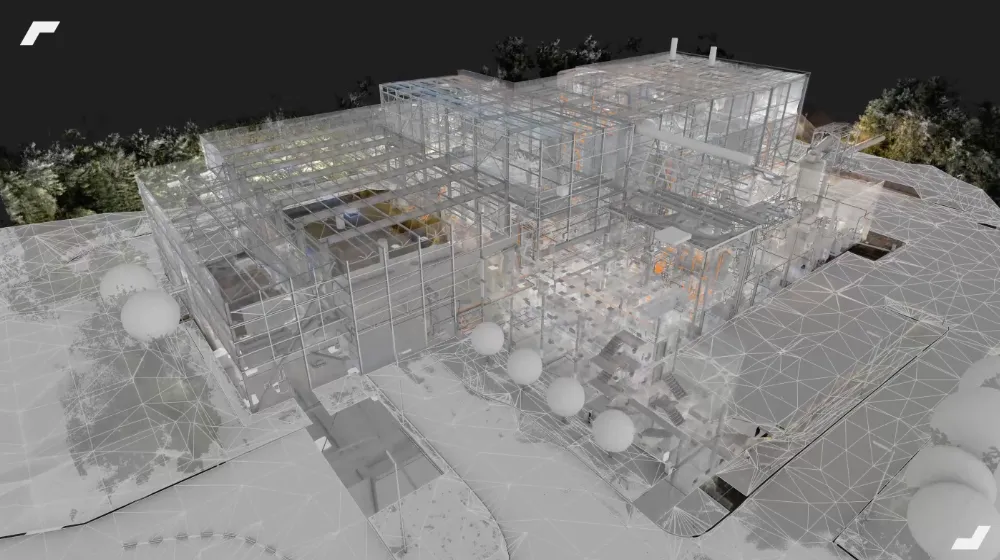
As illustrated above, a building point cloud is a true 3D footprint of a building and the equipment it contains. As an unmodified or simplified representation of reality, this format is the most suitable for the search for details and for fine analyses such as dimension taking or flatness analysis for example.
How do I generate a point cloud?
Lasergrammetry at the base of point cloud acquisition
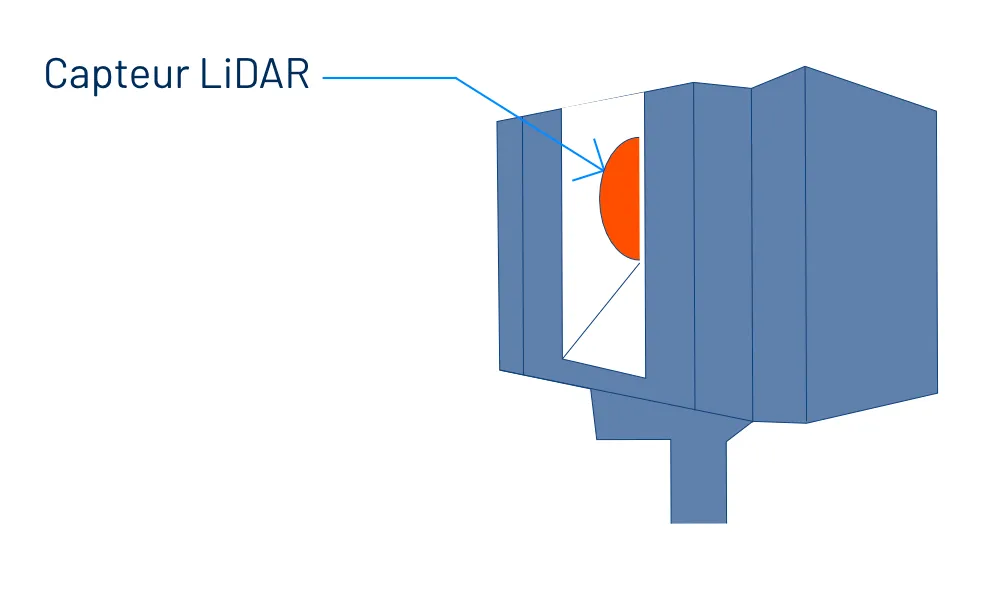
From traditional laser rangefinders to new acquisition solutions, measurement systems are based on the principle of lasergrammetry and on the use of LiDAR sensors, which are equipped with 3D scanners and certain drones.
These sensors emit a light beam that scans the environment horizontally and vertically until obstacles (wall, floor, furniture, machine, etc.) are encountered.
The distance to each obstacle is then measured, in order to position a point in space. Repeating this process during scanning then makes it possible to create a raw point cloud. The scanner scan therefore samples the environment by placing a point at each location where an obstacle has been encountered. The fineness of this scan and the range of the scanner are based on the configuration chosen, then defining a certain density of points.
Depending on the acquisition method and the sensors used, a point cloud can be in black and white or colorized. The process of colorizing the dots results from the use of the panoramic photo taken by the scanner.
In the building sector, terrestrial scanners (static and dynamic) are the most common capture equipment. The use of drones to raise facades, roofs or outdoor structures is also one of the developments in recent years.
Acquiring a single raw point cloud rarely covers an entire building, especially when using a static ground scanner. It will then be a question of recalculating and assembling several point clouds.
Acquisition and assembly of point clouds with a static scanner
The most common survey solutions, the static scanners make it possible to generate particularly dense point clouds. Mounted on a tripod and equipped with a unique LiDAR sensor, these scanners make it possible to digitize an environment “station by station”, each station being a fixed position where the scanner (mounted on a tripod) scans the environment over approximately 320°.

A point cloud is therefore generated for each of the stations, all the clouds must then be “adjusted” between them. This adjustment can take place:
- by overlay, using the ICP (Iterative Closed Point) method, which analyzes the distance between the points of two clouds to estimate the best possible transformations and alignments;
- by placing targets and spheres placed in the environment during capture, which make it possible to optimize consolidation when the environment has few characteristic geometric elements.
Acquisition and assembly of point clouds with a dynamic scanner
Unlike static scanners, mobile scanners (or dynamic) allow you to digitize the environment while moving. This principle of capture in motion is allowed by two elements:
- A simultaneous mapping location system (SLAM) allowing the scanner to be located in space;
- An inertial unit (IMU), analyzing the movements and movements of the scanner to estimate its orientation and linear speed.
The captured point cloud therefore covers an entire area, in which the operator moved with the scanner by:
- covering the entire area from a surface point of view;
- bypassing the objects (e.g. furniture) and structural elements (e.g. pillars) in the area in order to obtain a complete digitization.

Each point cloud therefore represents a defined area of the building that the operator will have chosen to travel.
It will then be a question of assembling each point cloud. To do this, targets common to several point clouds will have to be identified.
The coordinates of these targets can also be recorded by a total station and injected into the post-processing to facilitate the assembly of point clouds and correct drifts related to SLAM.

Point clouds from static and dynamic scanners can also be adjusted together according to these principles. This is exactly the approach of our multi-technology 3D scanning protocol, whose implementation makes it possible to take advantage of the advantages of each solution.
Point cloud file formats
There are multiple point cloud file formats, among the best known, we can for example name:
- OBJ: the format adopted by a wide range of applications such as Bentley Systems, RealityCapture, and Trimble.
- PLY: inspired by OBJ and specially designed to store 3D data. PLY is a file format that can represent color, transparency, surface normals, texture, and coordinates of data.
- LAS: one of the industry standard formats, widely used and compatible with most programs.
- PCG, RCS, RCP: file formats developed by Autodesk adapted to their software suite.
- E57: an independent file format for storing point cloud data and other metadata produced by laser scanners. This type of format has become one of the most used formats in recent years.
Capturing a 3D point cloud, a first step towards a multitude of uses
The first cases of basic use
A point cloud, even raw, already allows a multitude of uses. Indeed, using specialized software (such as Cyclone, 3DR, 3DR, Scene or Realworks), a point cloud is a complete and accurate representation of the building in which to search for information. By information, we are referring here to inspections (search for details, surface analyses, etc.) that can be carried out in a 3D scene, or to the possibility of taking dimensions, surfaces and dimensions in it.
If only with these first two application cases, the number of trips to and from a site has already been reduced, and doubts about the reality of the field are constantly being removed! Beyond manipulating this raw point cloud, it proves to be a reliable basis for creating and updating other spatial data for a project (2D plans and digital models in particular).
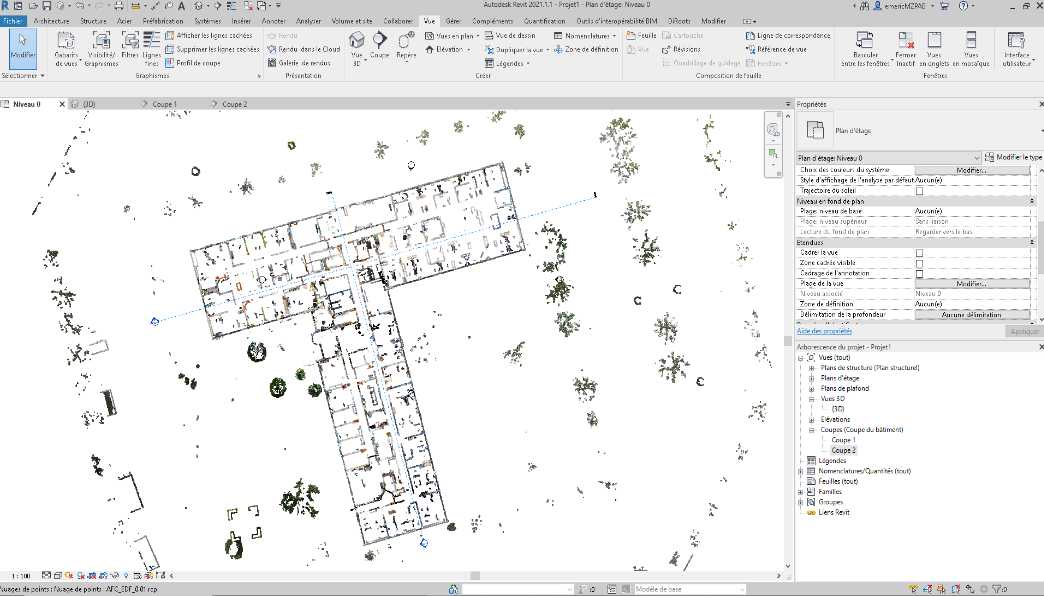
Draw a 2D plane based on the point cloud
From a point cloud, it is possible to isolate horizontal and vertical sections in the cloud, thus allowing the creation of sections, profiles or 2D views. These sections can then be used to draw various 2D geometries (building plans in DWG format, elevation plans, frame plans, ceiling plans, etc.) via business software such as AutoCAD. The 2D plans drawn or updated are therefore produced on a particularly precise imprint of reality.
Scan to BIM: from point clouds to BIM models
As we detail in this article on the” Scan to Bim ”, the point cloud can be used as a 3D modeling layer of a building.
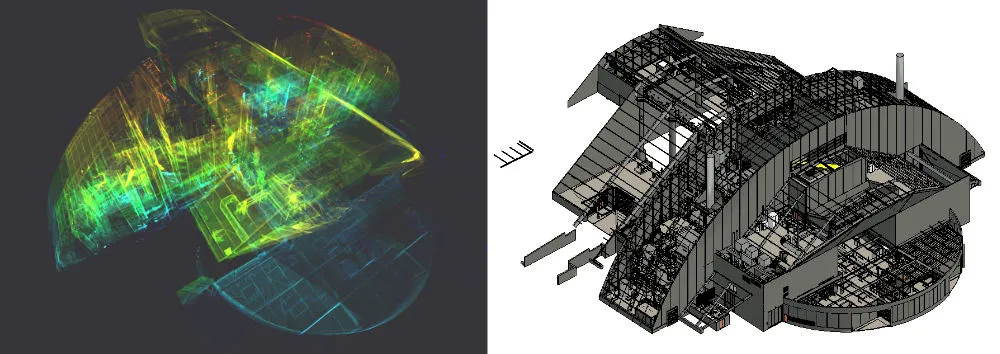
This method makes it possible to model a building more quickly, and to rely on a particularly reliable imprint of reality in order to move towards an “as-built” model of the building (as built).
Clash detection and update of a 3D/BIM digital model
It is more and more common for design offices, architects and project managers to benefit from a digital model of the building from the start of a project.
From the initial design model to the “As-Built” model of the building, it is subject to evolve. Keeping it up to date can then be called into question. It will therefore be a question of verifying the differences between the model and the real one in order to converge on an “as-built” model.
To do this, software such as Navisworks or Autodesk makes it possible to insert the point cloud (acting as an up-to-date spatial repository of the building) into the existing digital model.
Thus, it becomes possible to detect the differences (called “clash”) between these two entities, one being a representation of the real, and the other the geometric model towards which one wishes to tend. This method has two main advantages:
- be able to update the digital design model by following the evolution of the site;
- detect possible conflicts and react before they generate significant additional costs.
Virtual reality and 3D point clouds
Finally, a 3D point cloud can be used in virtual reality uses, in particular to conduct layout simulations for example. It is then used as a raw medium in which to remove and add 3D objects or to “crop” and move parts of the initial point cloud.
Concretely, this makes it possible, for example, to select a machine and move it around its environment to define its new location.
Towards a democratization of reality capture?
While mobile scanning solutions have already democratized Reality Capture thanks to the speed of capture they offer, new solutions are emerging and should accelerate this democratization.
Among these, we can mention the recent BLK2FLY, the first “autonomous flying laser scanner” from Leica Geosystem. Or again, the recent Leica's collaboration with Boston Dynamics, presenting another autonomous capture solution, but this time terrestrial!
To counterbalance the potential impact of these advances, let's not forget that a multitude of operational issues can currently only be managed by operators present in the field.
Thus, these solutions could mark a breakthrough in automating the updating of 3D building data, without replacing an initial capture that is often too complex.
To find out more
- Vercator: What are the most common 3D point cloud file formats and how to solve interoperability?
- 3D scanning, definition and uses in building
- The theory of the ICP principle (Iterative Closest Point)
- What scanning solutions should you choose for your project?
- What are the key steps in a 3D scanning project?
Let's study your project together
Contact us, we will study your project to provide you with an estimate as soon as possible
Contact us





To make sure you don't miss out on our news, subscribe to our newsletter now!
Receive quarterly updates directly in your inbox to stay informed about the latest news and events at My Digital Buildings.


